Misión COLMENA
Esta es la misión más ambiciosa que esta desarrollando LINX. La misión pretende demostrar la factibilidad de construir estructuras sobre superficies planetarias, utilizando enjambres de robots auto-organizados. La carga útil comprende un módulo de comando, telemetría y despliegue, que es producido por LINX y que es transportado por el módulo lunar Peregrine de la empresa Astrobotic.
Esta misión cuenta con el apoyo de AEM, CONACyT y UNAM, y será la primera misión mexicana a la Luna, lo cual representará un hito tecnológico, estratégico y mediatico para el país.
Resumen
La misión COLMENA tiene por objetivo principal demostrar el concepto del uso de micro-robots autónomos para la exploración y explotación espacial sobre superficies expuestas al medio interplanetario. Estas superficies se encuentran cubiertas de regolito, al vacío y cargadas electrostáticamente por acción de la radiación UV solar, lo que genera un plasma polvoroso que domina una capa límite de pocas decenas de centímetros. Esto vuelve a robots con dimensiones menores a esta escala, en instrumentos completamente diferentes a los existentes o siendo investigados en la actualidad en otros países, convirtiendo a COLMENA en un proyecto de frontera.
Los objetivos específicos comprenden principalmente: (a) el despliegue de 9 unidades idénticas sobre la superficie lunar y su navegación autónoma con la finalidad de maximizar su agrupación espacial y, si es posible, lograr conectividad eléctrica, uniendo sus paneles solares en paneles solares mayores; (b) medir parámetros del plasma polvoroso directamente sobre la superficie nuclear. El transporte de la carga útil a la Luna será realizado por la empresa Astrobotic, quien prevé el lanzamiento para septiembre de 2021. Al presente el diseño de la misión se encuentra congelado en todos sus aspectos principales; se cuenta con modelos operacionales de ingeniería de todos los subsistemas y la mayor parte de los esfuerzos se dedican a la selección de materiales, validación de componentes conforme requerimientos y procesos de manufactura correspondientes, así como al desarrollo de software. El cronograma actual de desarrollo de COLMENA prevé la conclusión de la carga útil en diciembre de 2020, y pruebas de aceptación de la misma en Q2/2021.
Colaboraciones con otras instituciones nacionales o internacionales
La misión COLMENA es exclusivamente desarrollada por el Laboratorio de Instrumentación Espacial, LINX, del Instituto de Ciencias Nucleares de la UNAM.
Alumnos del diversas carreras y niveles académicos de la UNAM, del IPN y de la UNACH, así como de escuelas preparatorias de la UNAM realizan o han realizado estancias en LINX y participado en diferentes aspectos de la misión.
También se ha recibido el amable apoyo en algunas tareas específicas por parte de investigadores y laboratorios de: los Institutos de Geofísica e Ingeniería y la Facultad de Ciencias de la UNAM, y el ESIME-Ticomán.
Así mismo, se han realizado consultas sobre materiales con investigadores de L'Institut de Recherche en Astrophysique et Planétologie (IRAP), Universite Paul Sabatier, Toulouse, Francia.
Carga útil
La carga útil debe obedecer a los siguiente requerimientos de alto nivel:
- Masa: inferior a 500 gramos
- Humedad
- 30% -- 90% AIT y almacenaje
- 0% -- operación (vacío)
- Temperatura: -120 °C -- +100 °C (153 K -- 373 K)
- Presión de operación: ~ 3x10-13 kPa
- Gradiente de presión: 6.2 kPa/s
- Cargas estáticas:
- Compresión axial: +8.5 g
- Tracción axial: -4 g
- Compresión/tracción lateral: 3 g
- Cargas dinámicas: 0 a 130 Hz
- Vibración acústica: < 143 dB
- Radiación: 80 krad (con 100 mm de shielding de Al)
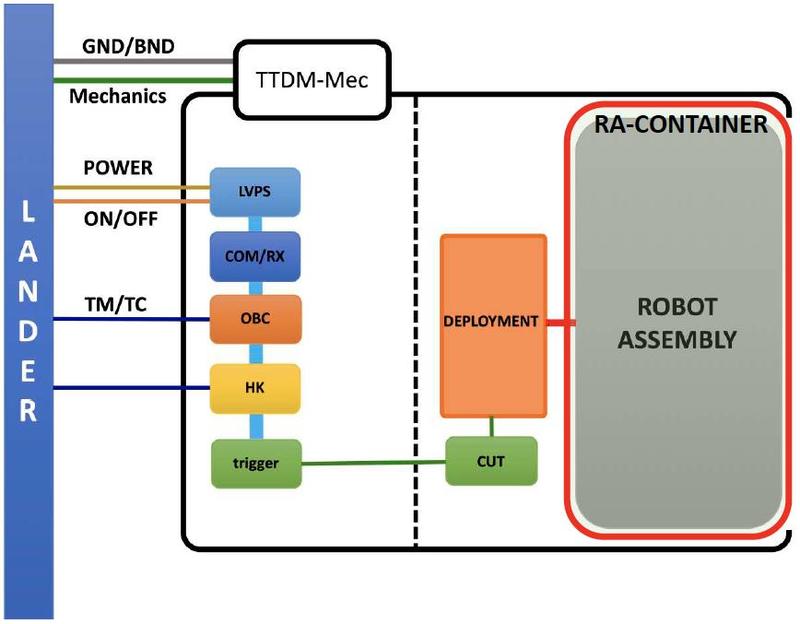
A continuación, se describe en bloques la carga útil en las figuras 1 (global) y 2 (robots). Básicamente la misma cuenta de los siguientes sistemas:
1. TTDM: Módulo de telemetría, telecomandos y despliegue, con masa total inferior a 140 gramos:
- 1.1. Electrónica: PCB único, flexible que contiene los siguientes subsistemas. acondicionamiento de potencia, control, comunicaciones, monitoreo, conector de interfaces, armado y disparo, mecanismo de corte, conexión a tierra y bonding
- 1.2. Estructura mecánica: anclaje mecánico al Lander, mecanismo de soporte y despliegue (brazo de catapulta), cazoleta, cofia y encordad
- 1.3. Interfaces con el Lander: mecánicas (cuatro tornillos para vibración) y eléctricas (potencia, ON/OFF, disparo, TM/TC, tierras y bonding
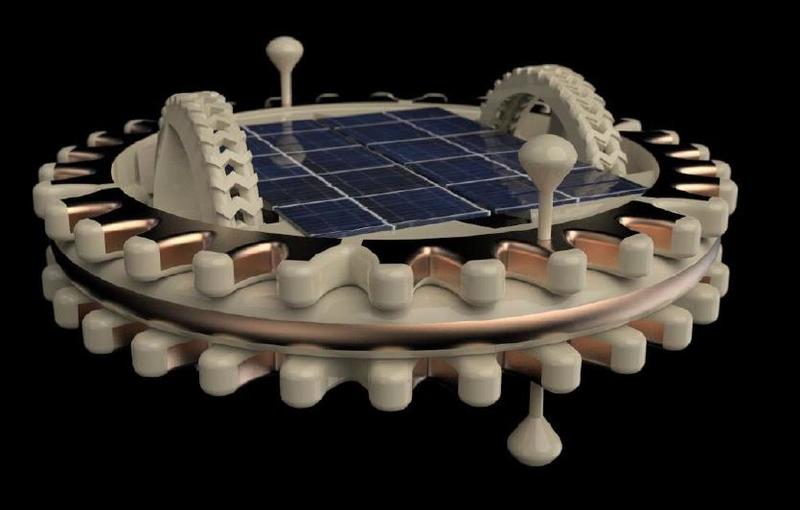
2. Robots: sistema de nueve unidades independientes, reversibles (i.e. simétricos respecto del plano medio), de 40 gramos cada una y con dimensiones externas totales de 83.5 mm x 38 mm:
- 2.1. Estructura mecánica: Es manufacturada aditivamente, con recubrimientos metálicos y cortes laser para confección de PCB 3D y consta de: toroide hueco en forma semejante a un engranaje compuesto de 3 capas paralelas, estructuras honey-comb para soporte de paneles solares y de motores, dos ruedas con motores independientes, 4 flotadores deslizantes para regolito
- 2.2. Electrónica: PCB único que contiene: sistema de potencia, regulación de voltaje, sistema de potencia de emergencia (Dt > 60 seg), computadora de bordo, sistema de comunicación y sensores de intensidad direccionales de campo en nueve bandas diferentes de 20 kHz de ancho entre 2473 y 2495 MHz, sensores de corriente, voltaje, temperatura, emisor de campo magnético a 20Hz, giróscopos, acelerómetros y magnetómetros 3D y conectores eléctricos omnidireccionales
- 2.3. Sistema de 8 paneles solares de última generación de Arseniuro de Galio.
Objetivos de la misión COLMENA
La misión COLMENA tiene por objetivo disparar el desarrollo del área de micro-robótica, como un nicho de capacidad y de oportunidad para México en la exploración y explotación espacial sobre superficies expuestas al medio interplanetario del sistema solar (principalmente lunas y asteroides).
La fortaleza de la micro-robótica en la gran mayoría de las aplicaciones espaciales no se encuentra en unidades individuales, sino en el trabajo cooperativo de grandes números de unidades autónomas en estrecha interacción.
Los nueve robots de COLMENA pretenden demostrar ese potencial en forma práctica sobre un ambiente relevante como es le de la Luna.
Adjetivos como “pequeño” o “micro” (en contraposición a “macro”), son términos comparativos y carecen de sentido a menos que se defina una referencia. En nuestro caso, la referencia, desde el punto de vista científico y tecnológico la brinda el regolito, que cubre ese tipo de superficies, y su dinámica.
El regolito es un polvo producido por fragmentación debida a impacto, a lo largo de 4,600 millones de años de bombardeo por micrometoritos. Es un polvo formado por granos sumamente irregulares y abrasivos, con tamaños promedio del orden de 30-50 mm, pero con escalas que se extienden hasta los nm. Este polvo es cargado electrostáticamente por la radiación UV solar, generando un campo eléctrico con intensidad de una decena de V/m (caso no perturbado por agentes externos) en el lado diurno. El campo electrostático hace que los granos más chicos, con tamaños inferiores a mm, leviten cerca de la superficie. Dichos granos, en combinación con fotoelectrones del regolito y electrones e iones del viento solar forman un plasma polvoroso sobre la superficie.
Ese plasma tiene en la superficie una longitud de Debye característica de alrededor de 20 a 30 cm. Esta escala divide por lo tanto dos medios con propiedades físicas muy diferentes. Los micro-robots de COLMENA, con menos de 4 cm de altura y, de hecho, la mayor parte de su electrónica a tan solo 1.5 cm del suelo, experimenta un medio ambiente y desafíos técnicos completamente diferentes a los de un robot o rover de dimensiones tradicionales. El vivir completamente contenidos dentro de esta capa límite de plasma polvoroso es lo que los define como un tipo diferente de tecnología.
COLMENA es un demostrativo de factibilidad de esta tecnología y, a la vez una plataforma de investigación del plasma polvoroso dentro dela capa limite debajo de una longitud de Debye. Ambos objetivos son completamente originales, tanto desde el punto de vista de ciencia básica como de ciencia aplicada y tecnología.
Tecnología
Robots de 40 g de masa no tienen ninguna capacidad calorífica significativa, y además están severamente restrictos en su capacidad de incorporar cualquier sistema activo de control de temperaturas, lo que implica que debe estar diseñado y construir para soportar tanto temperaturas extremas como gradientes extremos de temperatura.
Tampoco existe la posibilidad de incorporar blindajes de varios mm de aluminio, como es el caso usual, para proteger sus componentes más delicados contra la radiación.
Los motores deben tener masa de 2 o 3 gramos, con los cual es imposible vedarlos contra el regolito mediante sobre-presión. Igualmente no se posee suficiente presupuesto de masa como para bañar toda la electrónica en potting protegiéndola del contacto directo con regolito cargado.
La radiación UV generará diferencias de potencial de hasta 13 V entre conectores en lado opestos del robot, que están eléctricamente conectados entre ellos y con componentes que funcionan a 3.3 V.
Desde el punto de vista mecánico, el comportamiento del regolito es complejo. Si comprimido, los granos angulosos y con aristas tienden a bloquearse entre ellos, brindándole resistencia. Por el contrario, si no se lo comprime, los granos cargados en la capa mas superficial se repelen entre ellos, dándole una posible consistencia semejante a o la de fluido. Para una masa total de 40 gramos por robot, cada rueda o flotador soporta en media un peso de < 1.7 gramos. Bajo tensiones tan bajas es muy difícil de prever como se comportará el regolito ante el esfuerzo de tracción de las ruedas.
Sensores y comunicaciones también son afectadas por el regolito en levitación, que siendo geométricamente irregular y estando cargado, adquiere un momento dipolar eléctrico que lo puede orientar con cualquier campo eléctrico aplicado.
Soluciones o paliativos específicos para mitigar todos estos desafíos han tenido que ser diseñados e implementados. La valides de las suposiciones realizadas y estrategias adoptadas, solo pueden ser validadas en el medio real.
Ante tantas incertezas, el solo hecho de que los robots sobrevivan al viaje y alunizaje ya es un logro tecnológico. Más aún el hecho de que consigan prenderse y tener locomoción. Estos son por lo tanto los primeros objetivos. Además de la locomoción, el otro gran hito es la navegación con una meta definida hacia el mayor agrupamiento espacial de robots (idealmente todos en un mismo grupo, pero sino el menor número posible de grupos del mayor orden). Además de las dificultades propias de la locomoción y de la distorsión de la información brindada por los sensores a causa del regolito, está el hecho de que el sistema evoluciona en forma asíncrona, y el sistema de referencia local que construye cada robot tiene un retardo considerable con respecto a la realidad instantánea del ensamble. Es decir, decisiones de navegación son tomadas con respecto a una visión distorsionada del pasado y una estimativa estadísticamente borrosa del futuro. Por lo tanto, aglomeración es otro objetivo importante desde el punto de vista tecnológico. Finalmente, el objetivo avanzado es la conexión eléctrica de por lo menos algunas unidades, lo que tiene complejidades adicionales debido a la no homogeneidad del terreno, la precisión de la maniobra y simplicidad de los sensores correspondientes, así como la fragilidad mecánica de la conexión ante perturbaciones de una dada conexión por la llegada de un nuevo robot a un conjunto ya existente.
Ciencia
Las propiedades del plasma polvoroso dentro de la capa límite inmediatamente sobre la superficie lunar nunca han sido medidas. Lo que se sabe de ese plasma proviene de modelos numéricos. Cualquier medición directa de estos parámetros, así como la validación de las simulaciones numéricas utilizadas, es altamente valiosa. COLMENA será la primera medición a realizar este tipo de mediciones para caracterizar el plasma polvoroso en la capa límite.
Después de terminada la parte principal de navegación, que constituye el objetivo de demostración tecnológica y de filosofía operacional de COLMENA, comienza la fase científica de la misión. Libres de la necesidad de locomoción, los robots se convierte en un conjunto de 9 estaciones idénticas, independientes de medición.
Los robots cuentan con sensores de corrientes y voltajes, que pueden ayudar a caracterizar el blanketing de los paneles solares e, indirectamente, la dinámica y movilidad del polvo muy cerca de la superficie, donde se podría esperar una exósfera de granos nanométricos con trayectorias parabólicas. Los efectos serán aún más interesantes en la superficie del panel inferior, a solo 1 cm de la superficie, donde la densidad de regolito puede ser hasta 9 órdenes de magnitud mayor que en la parte superior del robot y los coatings para repulsión serán ineficientes debido a que solo reciben muy poca luz por reflexión.
Las temperaturas se podrán utilizar para validar tanto modelos termo-mecánicos de transporte de calor como para complementar simulaciones numéricas de plasma.
Una ventaja es que se tendrán nueve mediciones independientes de cada parámetro, permitiendo evaluar la influencia de las fluctuaciones estadísticas y de la variación de parámetros geométricos en las mediciones obtenidas.
Por otro lado, cada robot transmite en hasta nueve frecuencias diferentes en bandas alrededor de 2.48 GHz, dependiendo del grado de agrupación obtenido. Estas señales son atenuadas por dispersión en el regolito en levitación en el interior de la capa límite en su camino hasta el TTDM, que recibe todas estas señales.
Esta información se puede utilizar para estimar los siguientes parámetros:
- Sección transversal total de atenuación
- Densidad media de regolito dentro de la capa límite
- Radio promedio de las partículas en levitación en la capa límite
- Constante dieléctrica del regolito en suspensión
- Longitud de Debye inmediatamente sobre la superficie
Más aún los robots deberán estar en operación por hasta 7 u 8 días terrestres hasta la llegada del anochecer lunar, cuando dejarán de funcionar debido a las bajas temperaturas. Es de esperar que a latitudes medias, los valores de los campos electrostáticos inducidos varíen fuertemente con la inclinación del sol sobre el horizonte, por lo que se podrá medir la variación de estos parámetros en función del tiempo con resolución de minutos a lo largo de buan parte de un día lunar. Estas mediciones son completamente originales y de suma importancia para comprender la dinámica delos plasmas sobre la superficie lunar, dándole a la misión un gran valor científico intrínseco.
Perfil de la misión
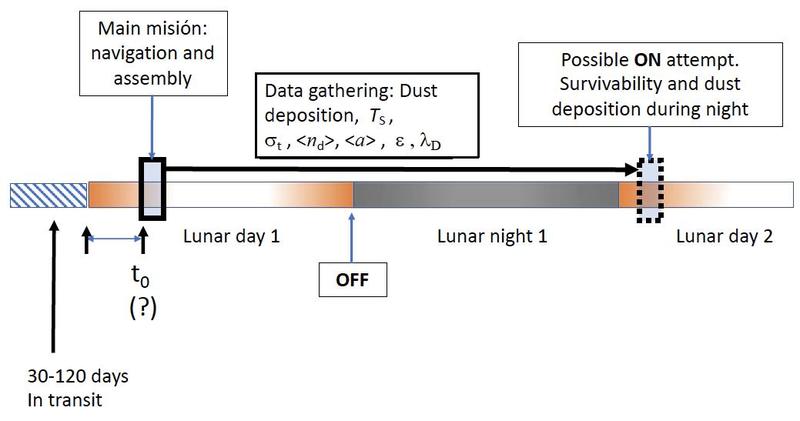
La misión puede dividirse en hasta 5 fases, que se muestran esquemáticamente en la figura 3:
- Fase 1: Comprende desde el lanzamiento al alunizaje y puede durar entre 1 y 4 meses. Durante toda esta fase la carga útil se encuentra apagada.
- Fase 2: En la superficie desde el alunizaje (al amanecer lunar) hasta el momento del despliegue de los robots (1 o 2 dias terrestres después, media mañana?). Se espera básicamente a que se disipe el combustible sobrante vennteado del Lander, a que se asiente el exceso de regolito y se desplieguen y alejen del Lander un par de rovers grandes que podrían interferir con los robots de COLMENA
- Fase 3: Despliegue con al catapulta de los robots, ON por iluminación solar, navegación, aglomeración y conexión (3 horas). Esta es la misión de investigación y cvalidación tecnológica.
- Fase 4: Misión científica. Desde el final de la fase 3 hasta el anochecer lunar (7 a 10 días terrestres) los robots, ya inmovilizados, dedican toda su energía a la medición de los parámetros de caracterización del plasma polvoroso de la capa límite.
- Fase 5: Posible ON al comienzo del segundo día lunar solo para verificar supervivencia a la agresiva noche lunar. Se considera como suceso extendido, ya que no es seguro tampoco que el Lander haya sobrevivido a la noche.
El lanzamiento se prevé para septiembre de 2021, con alunizaje en diciembre de 2021 y operaciones sobre la superficie lunar hasta enero de 2022. La fase de análisis de datos científicos y publicaciones se extenderá hasta fines de 2022.
Criterios de suceso
El suceso de la misión cubre tanto los objetivos tecnológicos (técnicos y operacionales) como científicos, y se encuentra catalogado en diferentes niveles:
Técnicos (T)
T.1: aceptación para integración por parte del Lander y del Lanzador
T.2: supervivencia al lanzamiento
T.3: supervivencia a la transferencia y alunizaje
Operacionales (O)
O.1: despliegue exitoso del TTDM
O.2: encendido de los robots después del despliegue
O.3: navegación sobre regolito
O.4: agrupamiento especial a diferentes órdenes de membresía (O.4.2, O.4.3…,O.4.9)
O.5: conexión eléctrica a diferentes niveles (O.5.2, O.5.3…,O.5.9)
Científicos (S)
S.1: medición y transmisión exitosa de T, V, i
S.2: estimativas de deposición de regolito sobre los paneles solares
S.3: estimativa de parámetros del plasma polvoroso de la capa límite
S.4: estimativa de la atenuación electromagnética dentro de la capa límite debido al regolito
Desarrollo de la carga útil
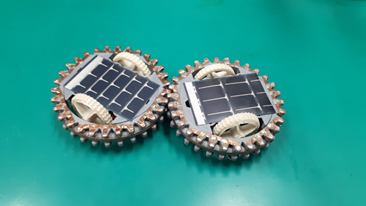
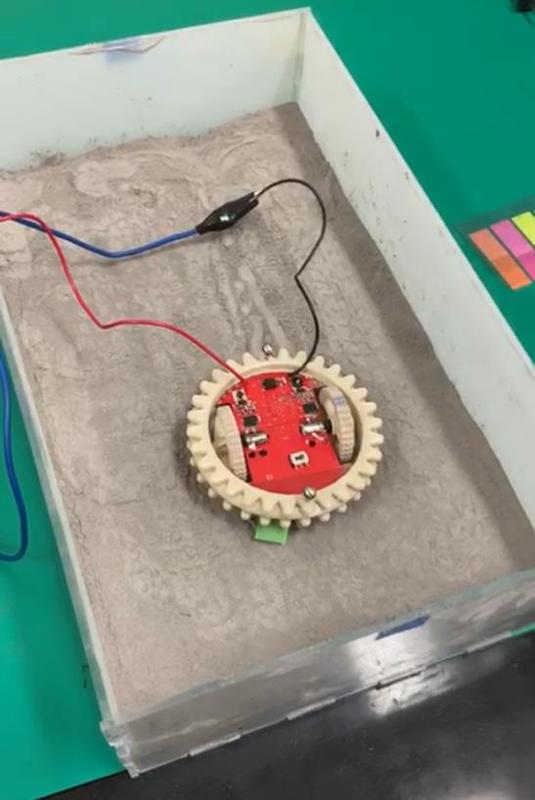
De todos los sistemas ya existen modelos avanzados de ingeniería. La figura muestra por ejemplo robots de la tercera generación de ingeniería, que ya representan el diseño congelado en la mayor parte de sus elementos. Sobre ellos se construirá la versión 4 que ya solo representa optimizaciones en masas y materiales. Sobre estos últimos se construirán los modelos de calificación y vuelo.
|
(a) Modelos de ingeniería de la versión 3 en ensayos de detección de conexión
(c) Render de modelo de vuelo basado en v3 |
(b) desplazamiento sobre simulante de regolito
|
De hecho, lo mismo se aplica al TTDM, para el cual ya se tiene la estructura mecánica y modelos de ingeniería de la electrónica, así como diseño y materiales de la cofia, que se teje en nuestros laboratorios.
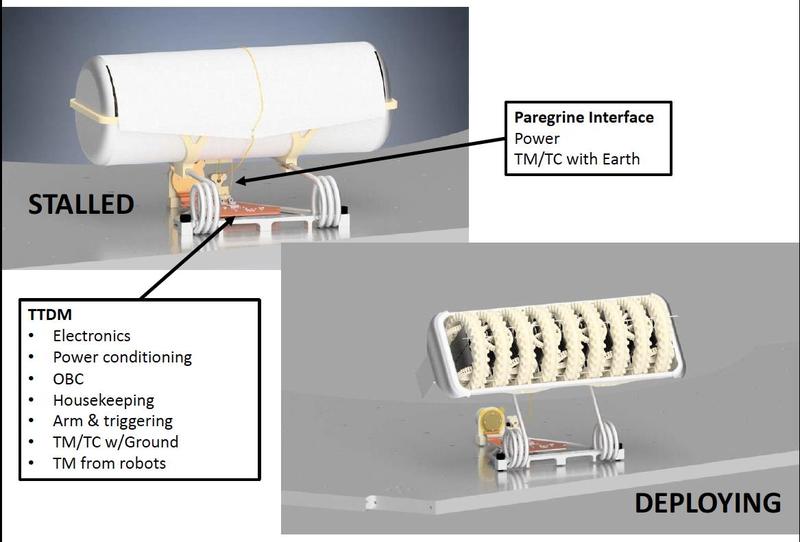 Estructura del TTDM
Estructura del TTDM
Equipo de trabajo
La misión COLMENA es exclusivamente desarrollada por el Laboratorio de Instrumentación Espacial, LINX, del Instituto de Ciencias Nucleares de la UNAM.
Alumnos del diversas carreras y niveles académicos de la UNAM, del IPN y de la UNACH, así como de escuelas preparatorias de la UNAM realizan o han realizado estancias en LINX y participado en diferentes aspectos de la misión.
También se ha recibido el amable apoyo en algunas tareas específicas por parte de investigadores y laboratorios de: los Institutos de Geofísica e Ingeniería y la Facultad de Ciencias de la UNAM, y el ESIME-Ticomán.
Así mismo, se han realizado consultas puntuales sobre materiales con investigadores de L'Institut de Recherche en Astrophysique et Planétologie (IRAP), Universite Paul Sabatier, Toulouse, Francia.
El desarrollo de toda la carga útil comprende 283 paquetes de trabajo independientes. En estos paquetes trabajan a todo momento alrededor de 50 alumnos de todas las ingenierías, física, química, astronomía, matemática, actuaría, arte, psicología, abogacía, de prepa, servicio social, tesis de licenciatura, maestría y doctorado. Ya han pasado por el proyecto 168 alumnos. Y se estima que pasen mas de 250 alumnos hasta el final del desarrollo de la misión.
